Kairos-HomeWorld Revolutionizes Robotics Training with On-Demand Physics-Enabled Synthetic Environments
June 5, 2026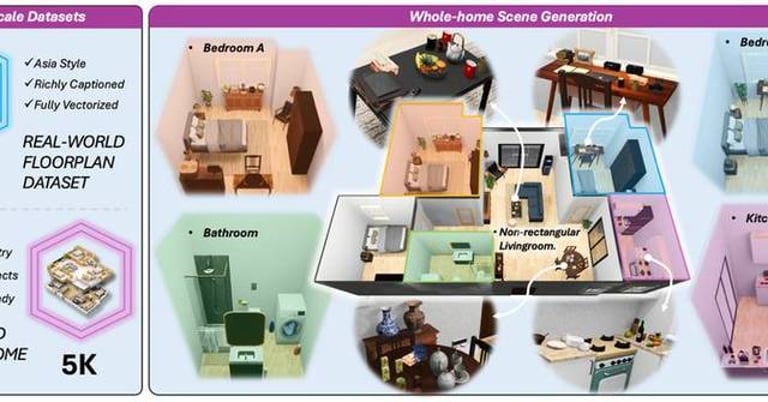
Kairos-HomeWorld translates a single natural-language prompt into end-to-end generation of coherent home environments that support navigation across multiple rooms and interactive tasks within a PhysX-Omni-enabled physics pipeline.
The initiative positions Kairos-HomeWorld as a practical pathway to accelerate home-robotics simulation-to-reality transfer by reducing real-world testing costs and enabling long-horizon task training in virtual environments.
The dataset focuses on Chinese housing typologies, covering units from roughly 30 m² to over 200 m² and including features such as cross-ventilation, enclosed kitchens, service balconies, wet/dry bathrooms, and entryway storage to improve transferability of robots trained in simulation.
Compared with existing datasets, Kairos-HomeWorld emphasizes Chinese housing typologies and broader regional representation to enhance cross-region transferability for robotic training.
Generated environments contain, on average, over 15 manipulable objects and achieve a Footprint Object Density of 4.16, indicating dense object placement on furniture surfaces for direct interaction.
The system enables end-to-end tasks from one prompt, including multi-room navigation and manipulation tasks like opening appliances, pouring liquids, drawing curtains, and grasping irregular objects in a fully interactive virtual home.
Kairos-HomeWorld offers on-demand synthetic generation with physics-enabled assets to cut real-world data collection costs and speed up simulation-to-reality transfer for embodied intelligence, with deployment in ACE ROBOTICS’ training workflows and availability on GitHub.
The dataset spans global coverage of Chinese housing typologies, from small studios to large homes, and incorporates varied room configurations and features like cross-ventilation and service balconies.
Kairos-HomeWorld uses a four-stage architecture—Floor Plan Generation, 2D-to-3D Lifting & Furniture Layout, Recursive Refinement, and Manipulable Object Placement—to produce globally coherent, physically plausible, simulation-ready scenes with more than 15 manipulable objects per environment and a Footprint Object Density of 4.16.
Objects in Kairos-HomeWorld are simulation-ready with explicit properties such as material composition, density, friction, and structural support, contributing to a high Footprint Object Density on surfaces.
A sample prompt yields a 90 m² two-bedroom neo-Chinese style apartment and a detailed interactive task sequence, such as tidying the home, illustrating full task decomposition and manipulation like opening doors and pouring liquids.
The dataset and framework aim to address realism, interactivity, and global spatial consistency at scale, enabling low-cost, scalable, and transferable robot training for home environments.
Summary based on 4 sources
Get a daily email with more AI stories
Sources

Bastillepost 巴士的報 • Jun 5, 2026
ACE ROBOTICS Open-Sources Kairos-HomeWorld , Enabling Fully Interactive Whole-Home 3D Scene Generation from a Single Prompt
DagangNews - Berita Bisnes Anda • Jun 5, 2026
ACE ROBOTICS Open-Sources Kairos-HomeWorld , Enabling Fully Interactive Whole-Home 3D Scene Generation from a Single Prompt | DagangNews - Berita Bisnes Anda
Media OutReach Newswire • Jun 5, 2026
ACE ROBOTICS Open-Sources Kairos-HomeWorld , Enabling Fully Interactive Whole-Home 3D Scene Generation from a Single Prompt
ACCESSWIRE Newsroom • Jun 5, 2026
ACE ROBOTICS Open-Sources Kairos-HomeWorld, Enabling Fully Interactive Whole-Home 3D Scene Generation from a Single Prompt