Breakthroughs in Autonomous Underwater Vehicles Boost Efficiency and Security in Ocean Exploration
October 1, 2024
Autonomous underwater vehicles (AUVs) play a crucial role in military and civilian ocean exploration, including applications like surveying, data collection, and anti-submarine warfare.
The task allocation among multiple AUVs is a significant focus, particularly in energy-constrained underwater environments, where effective strategies can enhance operational efficiency.
Research aims to identify effective task allocation strategies that not only improve operational efficiency but also reduce mission duration.
To alleviate the burden on operators, there is a push towards developing autonomy in underwater interventions, allowing operators to issue high-level commands instead of managing direct control.
Utilizing multiple remotely operated vehicles (ROVs) enhances cargo capacity, reduces costs, and increases adaptability to environmental changes, providing greater flexibility and reliability.
Findings indicate that advanced models significantly improve localization and trajectory tracking of ROVs, enhancing their operational effectiveness.
Innovative control systems, including the use of acoustic modems with non-linear control and predictive control, have been explored to address communication delays and improve control efficiency.
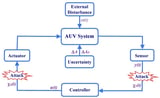
Recent research has focused on securing AUVs against sensor and actuator attacks, enhancing their resilience in cyber-physical systems.
The study proposes a ConvLSTM network to simulate communication latency and sensor sampling periods, which is crucial for trajectory tracking in leader-follower schemes.
Challenges such as time-varying delays and uncertainties in AUV controls necessitate robust control strategies to maintain system performance and stability.
Collaboration among ROVs not only enhances operational efficiency but also allows for simultaneous task execution, leading to improved solution quality and computational efficiency.
Recent projects like SAUVIM and TRITON have demonstrated varying levels of autonomy in underwater vehicle interventions, utilizing methods such as vision-based servoing and learning by demonstration.
Summary based on 4 sources