Revolutionizing Autonomous Driving: Breakthrough in Small Object Detection
March 11, 2024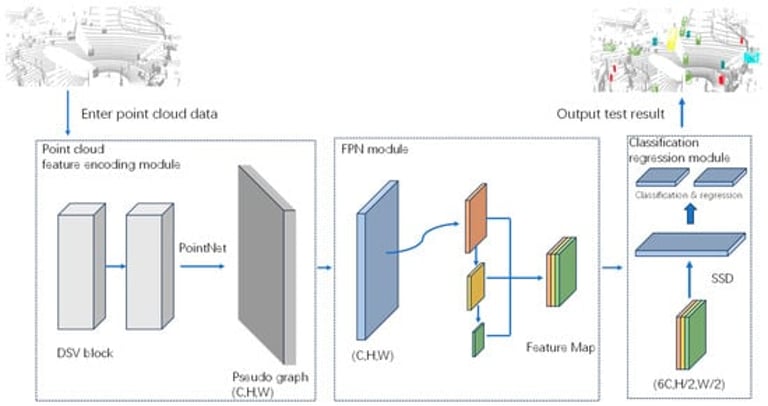
Advancements in sensor devices, computing, and deep learning have led to significant improvements in autonomous driving target detection.
A new 3D point cloud object detection method using dynamic sparse voxels has been proposed to increase the accuracy of detecting small objects like bicycles and pedestrians.
The dynamic sparse voxel transformer block in the new method improves feature extraction from point clouds, which has shown better accuracy in benchmarks like KITTI without compromising speed.
Another novel method has also been introduced, which significantly enhances the detection of small objects while maintaining high detection speed, indicating a balance of accuracy and efficiency.
Improvements in PointPillars technology through DSV and multi-scale FPN modules have led to faster detection speeds and higher accuracy, confirmed by ablation experiments.
These technological advances in computer vision and optical technologies are paving the way for new vision sensors that could impact a wide range of fields beyond autonomous driving.
Summary based on 2 sources

